












一、軟件使用
1.MLC04v16軟件的安裝
安裝文件夾內有CD1、CD2、CD3三個文件夾,打開CD1文件夾,
雙擊setup.exe進行安裝,如圖所示選擇英文后,點Next
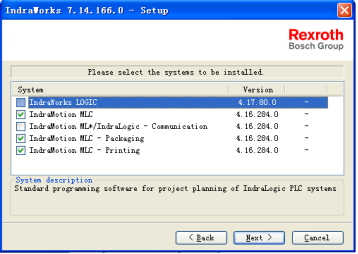
按如圖所示選擇,點Next。
點擊Next
點擊Next
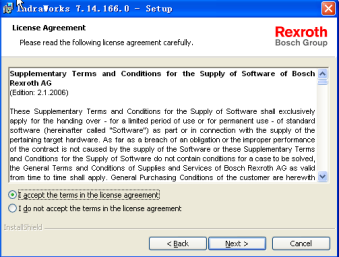
選擇接受,后點擊Next
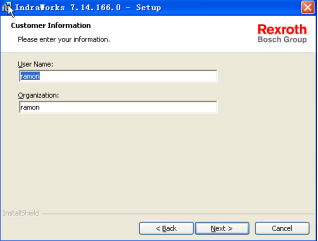
輸入名稱,點擊Next
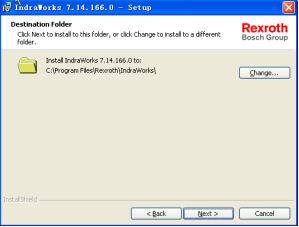
選擇安裝目錄,然后點擊Next
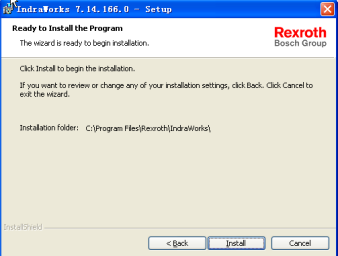
點Install
安裝進度如下:真個過程可能要10多分鐘,看電腦性能。
完成窗口如下:
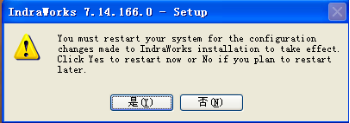
完成后需要重啟。點”是”自動重啟,點”否”則不重啟。
2.軟件操作
n打開軟件
l雙擊桌面快捷方式,如下圖所示。

通過點擊 開始菜單->程序->Rexroth->IndraWorks7.14.166.0->Engineering.來打開。
軟件使用
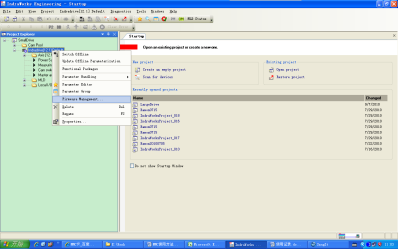
工程的使用
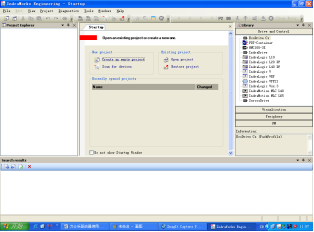
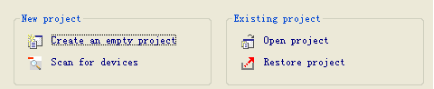
如下圖
點擊Create an empty project為建立一個新工程。
點擊Open project打開一個現有工程。
點擊Scan for devices掃描串口總線上的設備
點擊Restore project把保存的已壓縮工程,解壓縮。
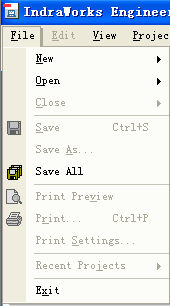
點擊下面快捷按鈕,第一個為新建工程,第二個位打開現有工程。

點擊File下拉菜單后,New:新建工程;Open:打開工程。
與伺服啟動器聯機
打開工程后 變為
變為
點黃色圖標進入虛擬模式。
點藍色圖標連接實際驅動器。
如果端口配置正常則直接聯機,否則會彈出如下窗口。
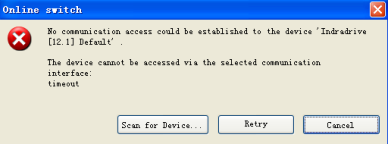
點擊Scan for Device后彈出如下窗口
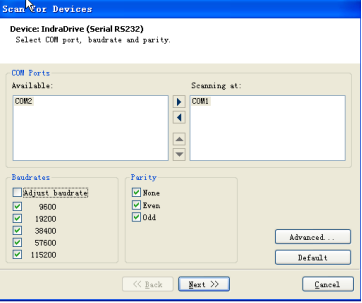
點Next后自動尋找設備。
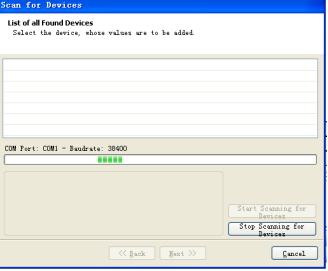
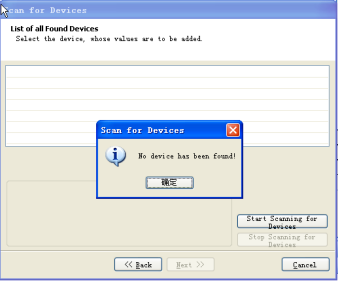
未找到設備則彈出下面創庫
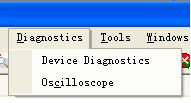
示波器功能
點Diagnostics下拉菜單,點擊Oscilloscope
下圖所示為示波器窗口。
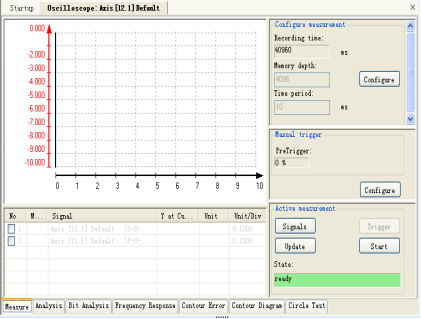
采集時間配置:
點擊右上角的Configure后彈出,時間配置。
其中Memory depth,采集的點數
Time period:每10ms采集一個點
Recording time:前面兩項相乘得出的總采樣時間。
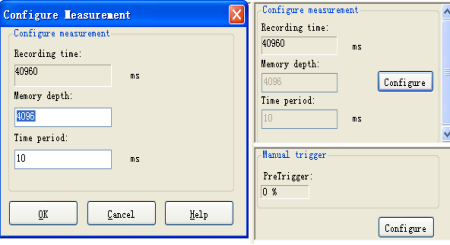
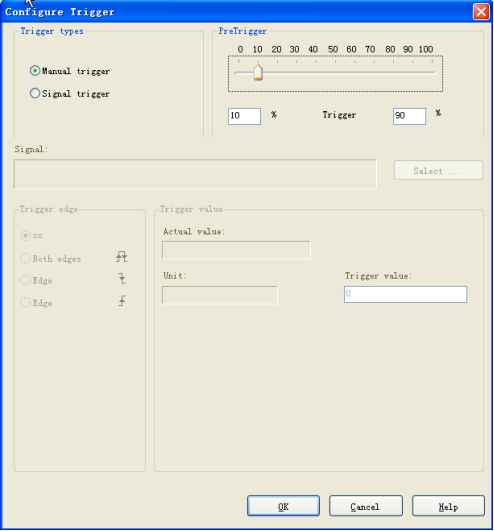
觸發方式配置:
點擊上圖右下角的Configure后彈出如下窗口:
Manual trigger 為手動觸發。
PreTrigger 為記錄觸發前數據長度的百分數,觸發后數據長度的百分數。
自動觸發:
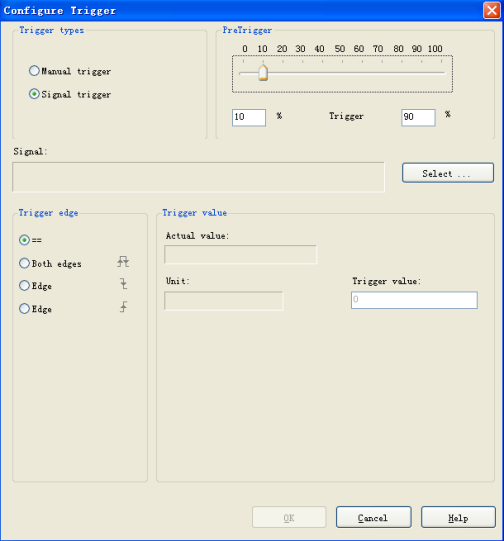
點擊Select選擇觸發源
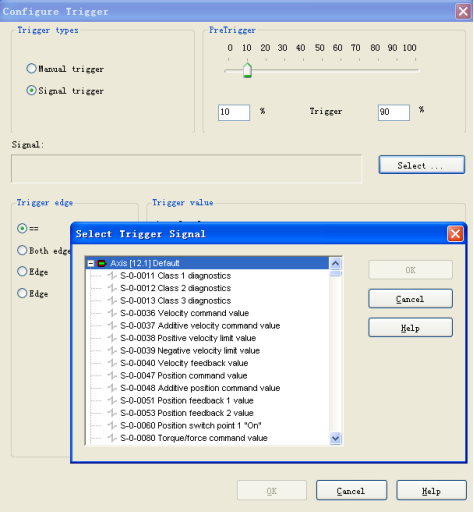
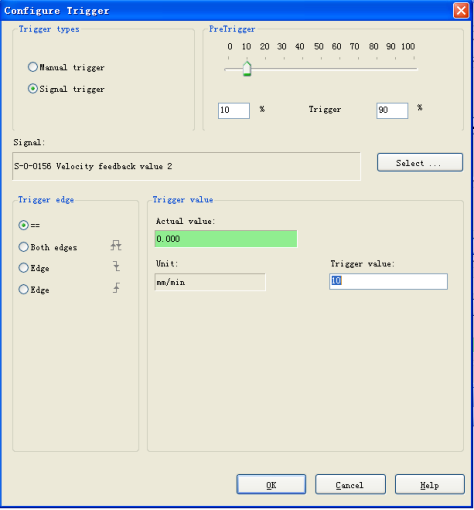
選擇后如下圖所示
== 當實際值Actual value=Trigger Value時 觸發
Both edges 當Actual value>Trigger Value或Actual value<Trigger Value時產生的上升沿和下降沿觸發。
Edge 下降沿觸發
下降沿觸發
Edge 上升沿觸發
上升沿觸發
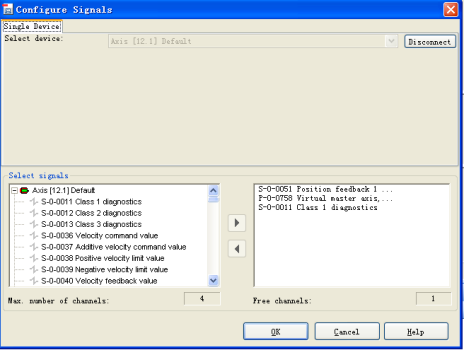
采集配置
點擊Signals后彈出如下窗口,選擇要采集的信號
 表示示波器軟件連接伺服驅動器還是斷開連接的操作
表示示波器軟件連接伺服驅動器還是斷開連接的操作
手動觸發數據采集時先點Start再點Trigger。
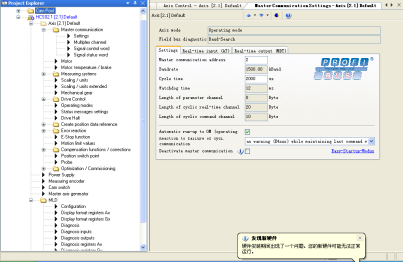
二、參數配置
DP配置 |
Master communication address:2從站地址。 |
Baudrate:波特率由主站決定 |
Cycle time:2000 us 通訊周期 |
Watchdog time:12ms 通訊看門狗時間 |
Length of parameter channel 0 byte 參數通道長度 |
Length of cyclic real-time channel 20byte 實時數據通道(驅動器向PLC一次可以寫20個字節) |
Length of cyclic command channel 10byte 命令數據通道(PLC向驅動器一次可寫10個字節) |
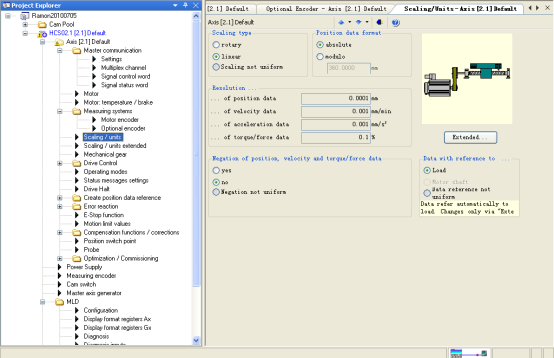
1.軸設定
Scaling type: 選擇linear直線軸。
Position data format:absolute絕對位置
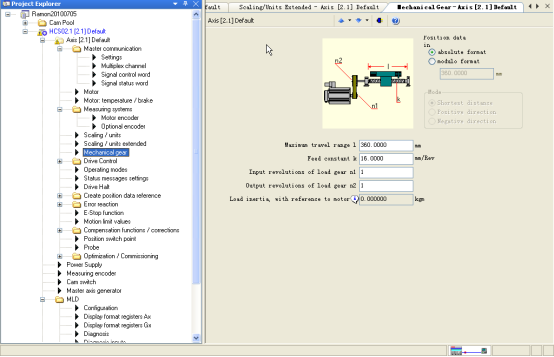
Maxinum travel range l: 360 mm 最大行程
Feed constant k: 16 mm/rev 導程
Input revolutions of load gear n1 : 1 輸入比例
Output revolutions of load gear n2 : 1 輸出比例
2.設定原點
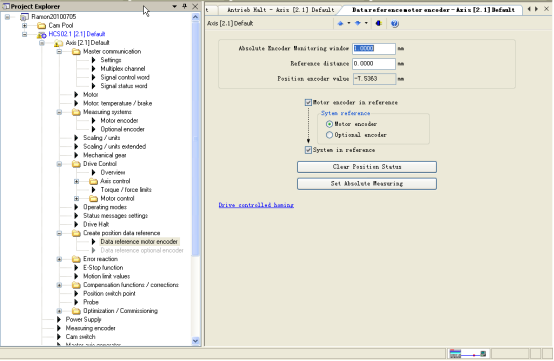
Clear position status: 清除當前位置
Set absolute measuring: 設定位置
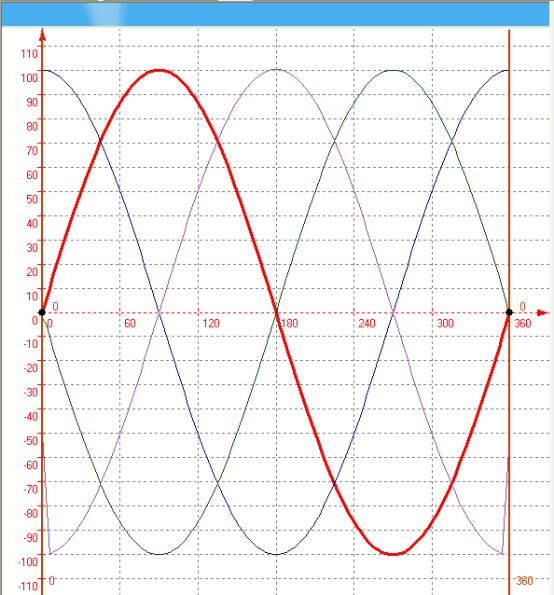
3.主軸監視
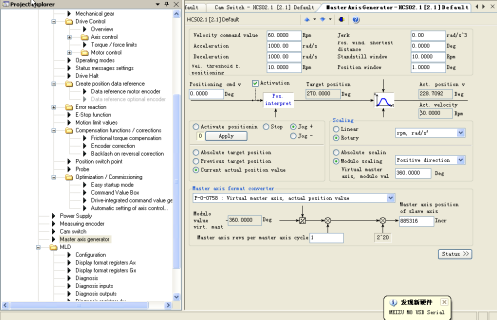
Velocity command value 60RPM。 監視當前設定頻率
Target Position: 270 deg 監視當前電機所處正弦的相位
Master axis format converter:P-0-0758:Virtual master axis,actual position value。主軸模式為虛擬主軸,實際位置。
4.MLD配置
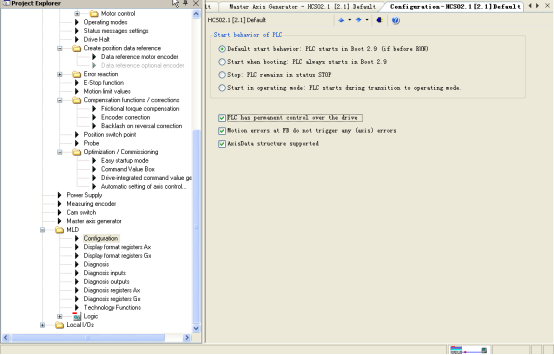
nPLC has permanent control over the drive:驅動器具備PLC功能(可編程邏輯控制)。
nMotion errors at FB do not trigger any(axis) errors :在FB內發生的motion錯誤不觸發軸錯誤
nAxisdata structure supported 支持程序內調用軸數據
5.電阻設置
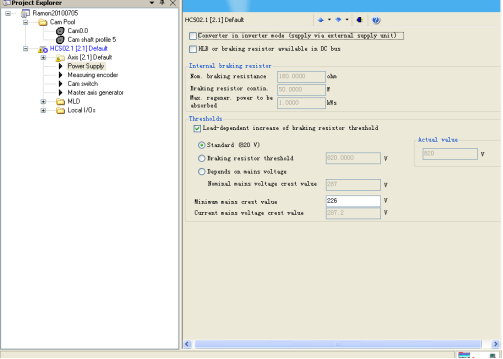
Nom,braking resistance 160ohm 制動電阻160歐姆
Braking resistor contin 50W 制動電阻功率50W
Max,regener power tobe absorbed: 1KWS
6.參數保存
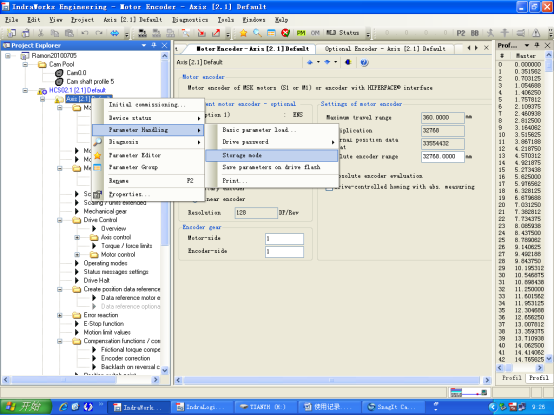
修改完參數后必須按如圖操作,否則不能保存參數。
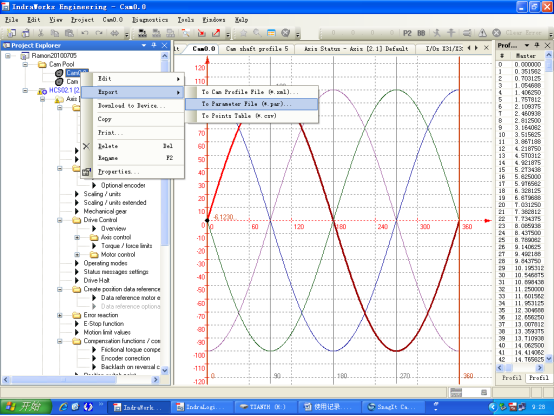
7.下載凸輪表5,6,7,8
凸輪表5,6,7,8不能直接下載,需用如下方法下載
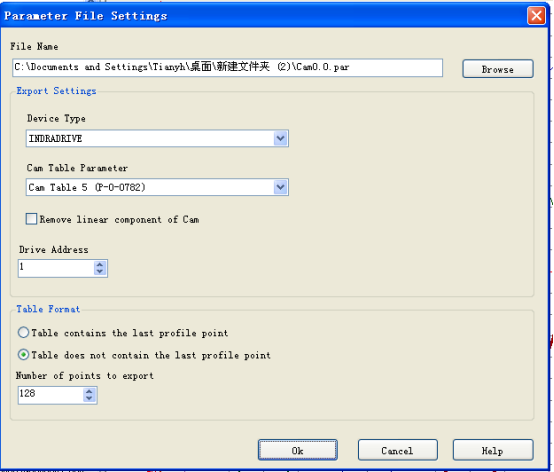
首先按如圖所示保存為外部文件
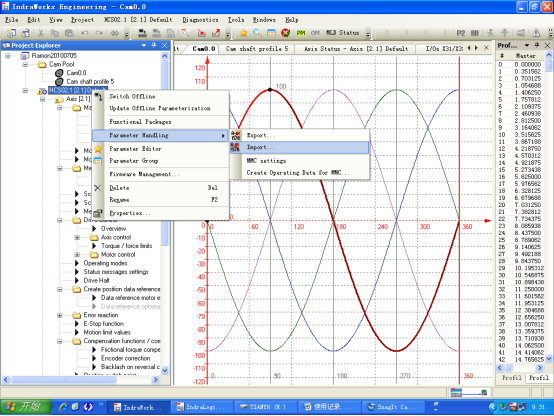
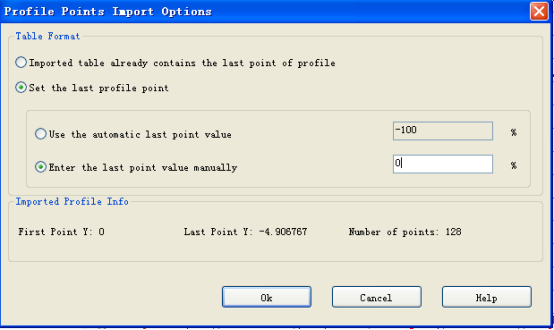
其次再按圖所示導入凸輪表
再上傳凸輪表會如下圖:
8.IO配置
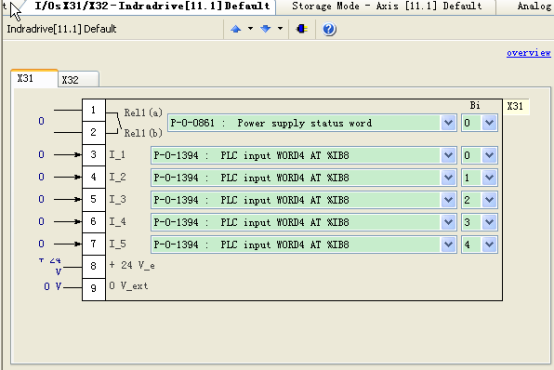
1,2腳位電源輸入, 在程序內部可讀P-0-0861的第0位。
3,4,5,6,7為數字量輸入,分別為P-0-1394的第0,1,2,3,4位。并可通過IB8訪問,同樣是0,1,2,3,4位。
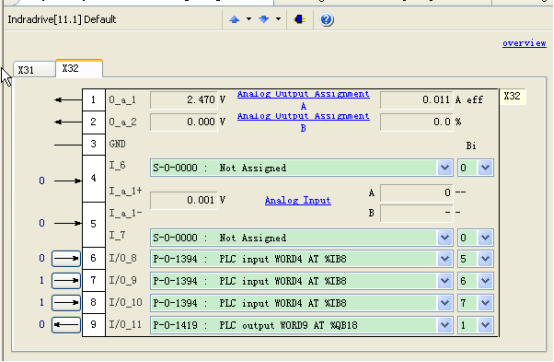
1,2為模擬量輸出。
4,5為模擬量輸入。
6,7,8腳位數字量輸入
9為數字量輸出
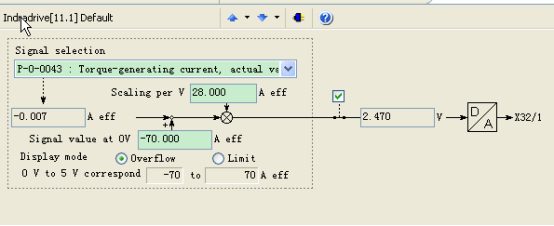
如圖所示配置,為把實際電流通過模擬量送出。對應關系為0~5V對應-70A~70A。每伏對應28A。
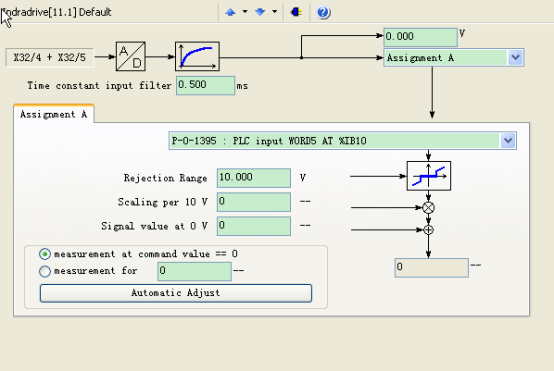
如圖所示配置為采集0~10V信號,并映射到IB10,可用程序訪問IB10。
9.固件版本更新
首先打開FirmWare management
選擇本地FirmWare后顯示在左側,右側為當前驅動器內的的FirmWare
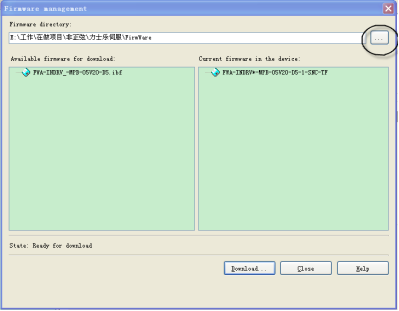
點擊DownLoad 后下載新固件。
三.PID調節
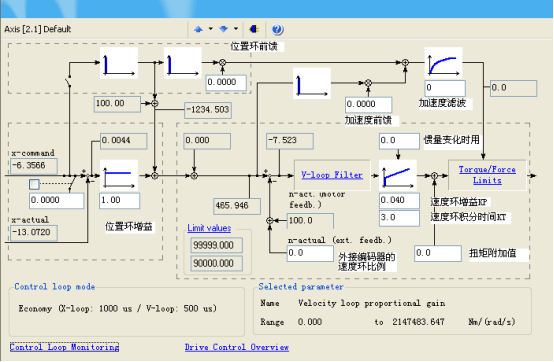
位置環
位置環增益:提高此參數可以提高位置整定的速度。
位置環前饋:提高此參數可補償位置環的變化。
速度環
速度環增益KP:提高此參數值,提高速度環強度,提高調節速度。
速度環積分時間:提高此參數值,可較少速度波動,但是會降低響應時間。
微信掃一掃
關注公眾號


18150066586 3004636837@qq.com 0591-87578810
15306977124 3004993430@qq.com 0591-83851589
15306977204 2851617306@qq.com 0591-88075780
15306977014 2851617301@qq.com 0591-87580173
18005007289 2851617310@qq.com 0591-87722515
15306977484 2851617304@qq.com 0591-83855060
18065057209 2881507050@qq.com 0591-22875422
15306977024 2851617309@qq.com 0591-83532940
15306977134 2851617313@qq.com 0591-83841178
15306977494 2851617303@qq.com 0591-83855720

經過十幾年的長足發展,公司規模逐步擴大、營業額穩步提升,長期與歐、美、日等全球知名工業廠商保持合作,代理經銷全球知名品牌工業自動化產品,經營范圍主要涵蓋進口高端控制系統PLC模組、工業機器人備件、可編程控制器備件、伺服控制系統備件、人機界面、變頻器、編碼器、傳感器、液壓氣動、儀器儀表等。